World models for deformable objects should recover not only geometry and
appearance, but also underlying physical dynamics, interaction grounding, and
material behavior. Learning such a model from real videos is challenging because
deformable linear, planar, and volumetric objects evolve under high-dimensional
deformation, noisy interactions, and complex material response. The model must
therefore infer a physical state from visual observations, roll it forward under
new interactions, and render the resulting dynamics with high visual fidelity.
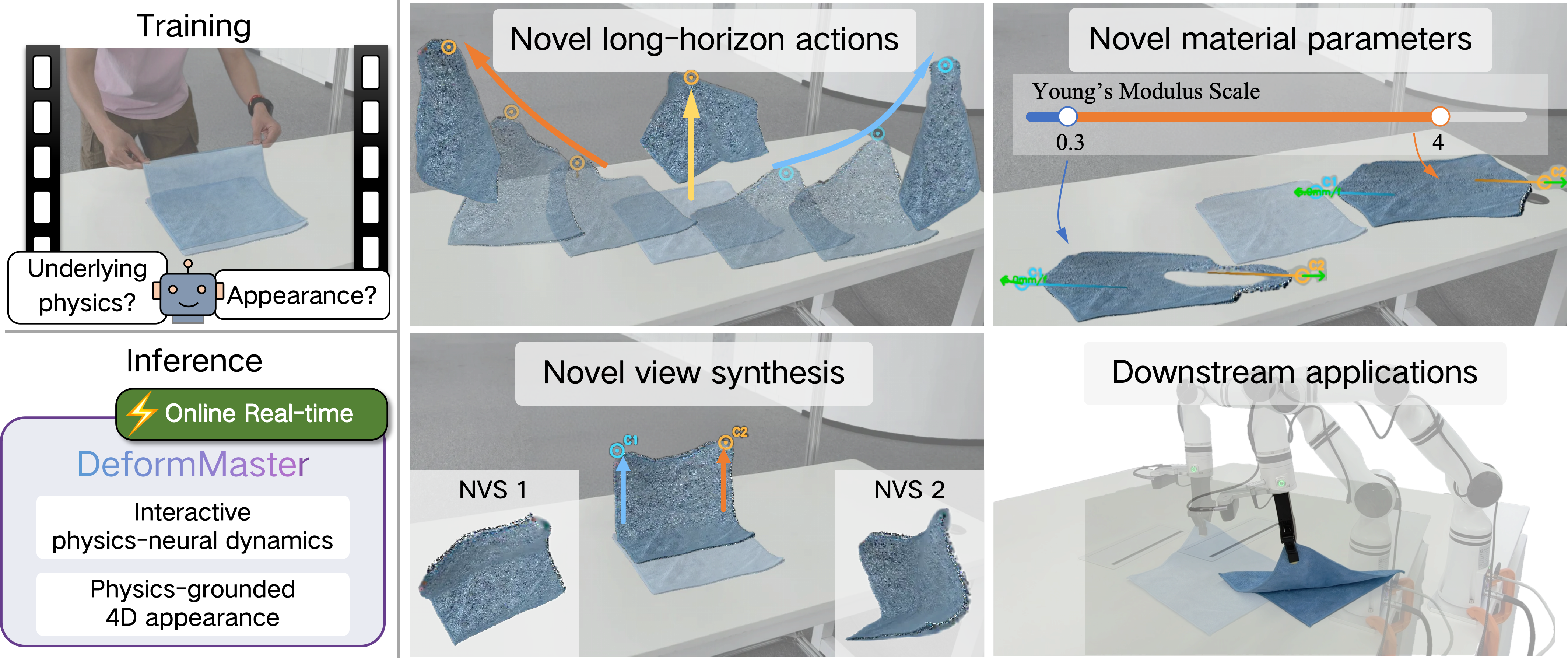
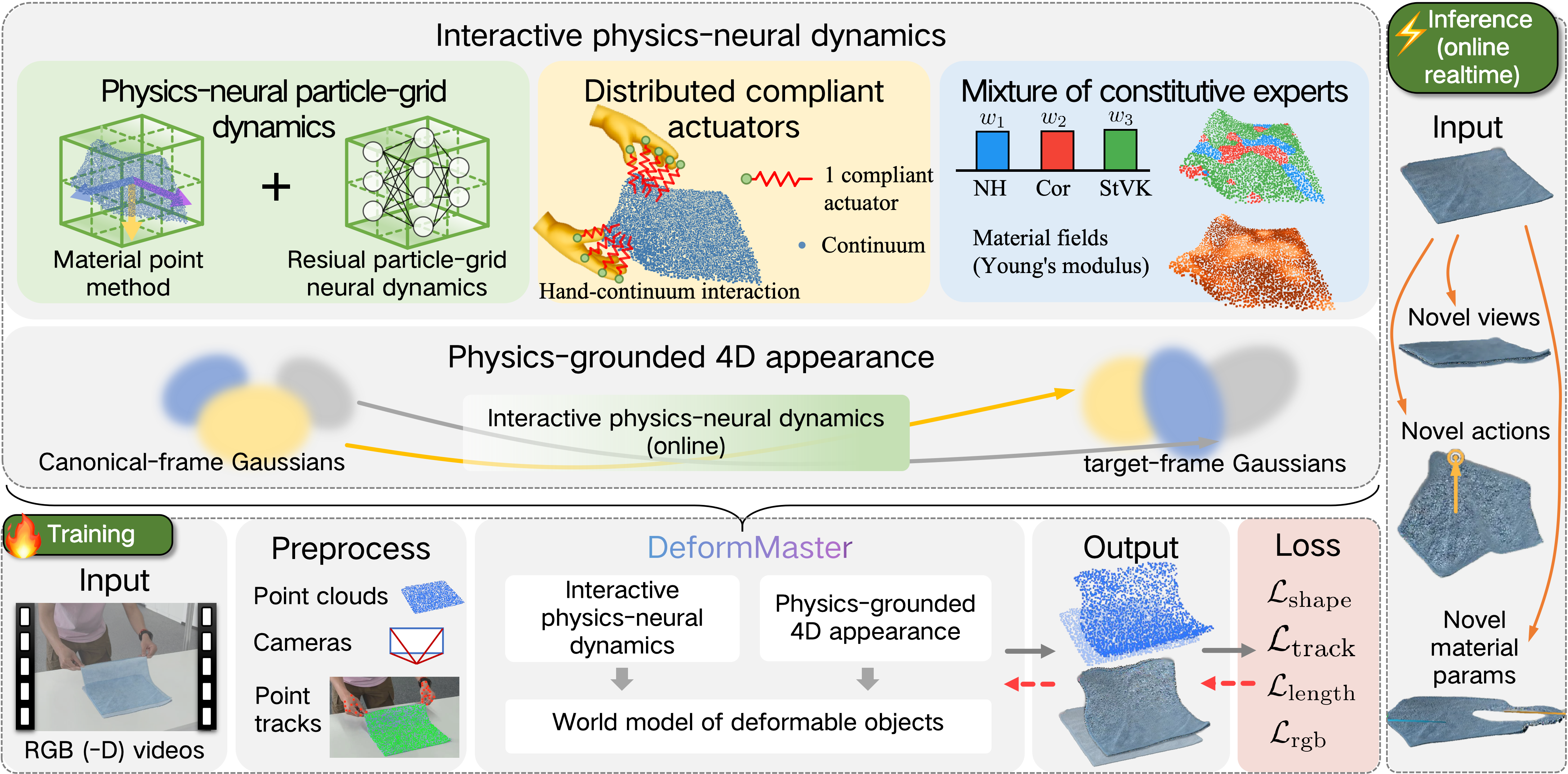
We present DeformMaster, a video-derived interactive
physics-neural world model that turns real interaction videos into an online
interactive model of deformable objects within a unified
dynamics-and-appearance framework. DeformMaster preserves structured physical
rollout while using a neural residual to compensate for unmodeled effects, grounds
sparse hand motion as distributed compliant actuators for hand-continuum
interaction, represents material response with spatially varying constitutive
experts, and drives high-fidelity 4D appearance from the predicted physical
evolution. Experiments on real-world deformable-object sequences demonstrate
DeformMaster's ability to roll out future dynamics and render dynamic appearance,
outperforming state-of-the-art baselines while supporting novel action rollout,
material-parameter variation, and dynamic novel-view synthesis.